研究
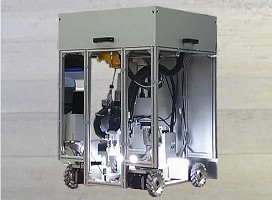
自走式ネジ締めロボット
IoT,車載用の情報セキュリティプラットフォーム
ITS開発 監視カメラ振動シミュレーションシステム
リペア・エコロジー
ITS開発 小電力ミリ波レーダー反射システム
脳波分析による居眠り防止システム
床板のネジ締め作業を自動的に行うロボットの開発 ・ネジ締め位置の検出 ・ドリル加工/バキューム制御 ・ネジ締め ・壁検出/落下防止機能
モノのインターネット(IoT)や車載ネットワークの情報セキュリティ強化に特化した、セキュリティプラットフォームの開発
・X,Y,Z軸の3軸同時コントロール ・地磁気センサーによる現在地の修正 ・カメラ位置・制御をシミュレーション画面表示
・効率化を考慮したプログラミング ・基板効率化のため部品点数削除、回路シミュレーション(温度、インピーダンス) ・ケース・筐体の構造改善
・ミリ波レーダー反射装置の制御(左右120°サーボモータ制御 速度は往路190msec) ・反射装置の動きをシミュレーション画面表示
・脳波を感知、分析し警告を通知 ・Android端末と脳波計測装置とのBluetooth通信による接続